

Ein SHR-Füllstandüberwachungssensor ist ein Gerät, das zur Überwachung des Füllstands von Flüssigkeiten in einem Tank oder einem anderen Behälter dient. Der Sensor besteht aus einer Sonde, die in den Tank eingeführt wird, und einem Controller, der sich außerhalb des Tanks befindet. Die Sonde ist über ein Kabel mit der Steuerung verbunden.
Prinzip:
Das Funktionsprinzip eines SHR-Füllstandüberwachungssensors basiert auf dem kapazitiven Prinzip. Ein Kondensator ist ein Gerät, das Energie in einem elektrischen Feld zwischen zwei Leitern speichert. Die in einem Kondensator gespeicherte Energiemenge ist proportional zur Kapazität des Kondensators, die durch die Größe und Form der Leiter sowie den Abstand zwischen ihnen bestimmt wird.
Bei einem SHR-Füllstandüberwachungssensor sind die beiden Leiter die Elektrode und das flüssige Medium. Die Elektrode ist ein Metallstab, der in den Tank eingeführt wird, und das flüssige Medium ist die zu überwachende Flüssigkeit. Beim Eintauchen der Elektrode in die Flüssigkeit erhöht sich die Kapazität zwischen Elektrode und Flüssigkeit. Dieser Kapazitätsanstieg wird vom Sensor erfasst und zur Bestimmung des Flüssigkeitsstands im Tank verwendet.
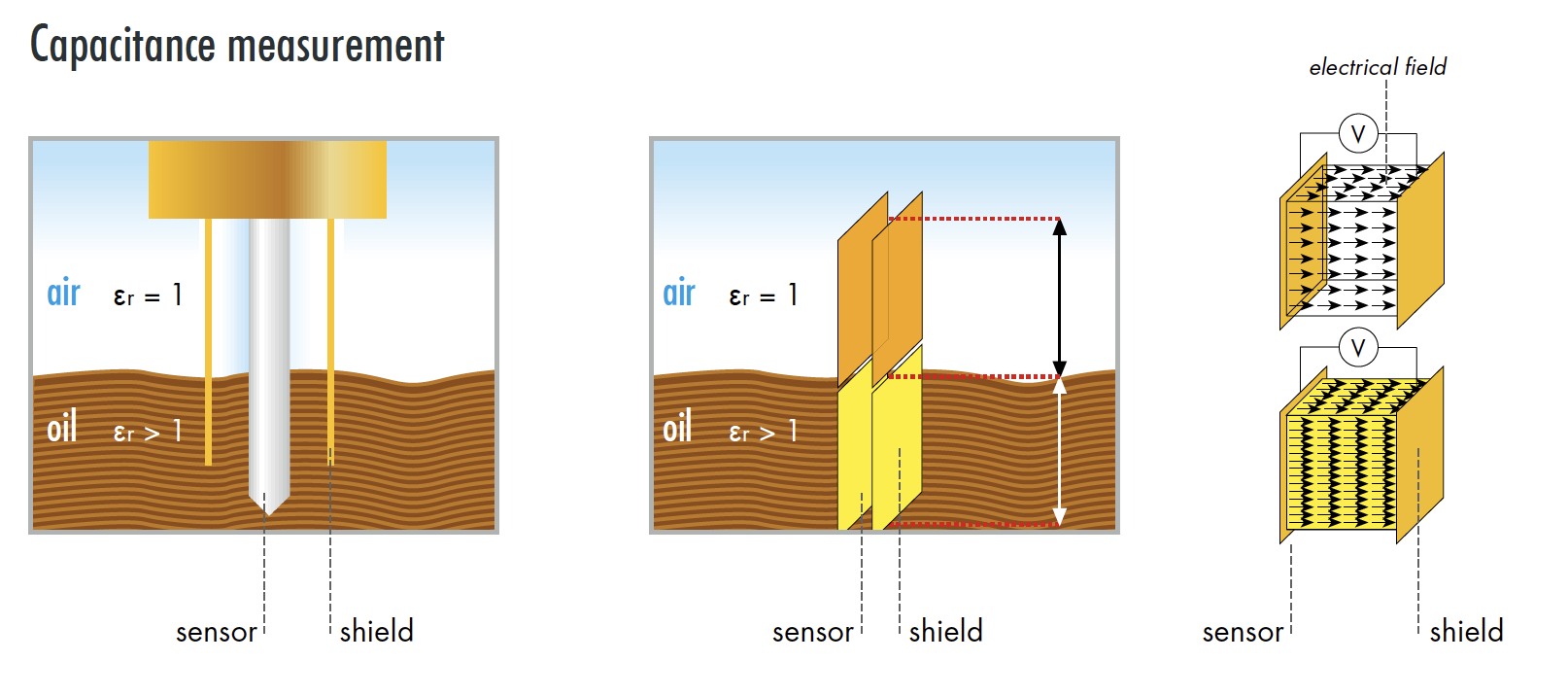
Der Sensor ist normalerweise so kalibriert, dass er den Flüssigkeitsstand in einem bestimmten Bereich erkennt. Beispielsweise kann der Sensor so kalibriert werden, dass er den Flüssigkeitsstand in einem Bereich von 0 bis 1001 TP3T erfasst. Wenn der Flüssigkeitsspiegel 0% beträgt, ist die Kapazität zwischen der Elektrode und der Flüssigkeit auf ihrem Minimalwert. Wenn der Flüssigkeitsspiegel 100% beträgt, ist die Kapazität zwischen der Elektrode und der Flüssigkeit maximal.
Mit dem Sensor kann der Füllstand verschiedener Flüssigkeiten erfasst werden, darunter Wasser, Öl und Benzin. Der Sensor ist außerdem vibrationsfest und kann in rauen Umgebungen eingesetzt werden.

Die Sonde enthält einen Sensor, der den Flüssigkeitsstand im Tank erkennt. Der Sensor sendet ein Signal an die Steuerung, die dann den Flüssigkeitsstand auf einem Bildschirm anzeigt oder ein Signal an einen Alarm sendet.
SHR-Füllstandüberwachungssensoren werden in einer Vielzahl von Anwendungen eingesetzt, darunter:
- Motorüberwachung
- Kraftstoffüberwachung
- Wasserüberwachung
- Abwasserüberwachung
- Bilgenüberwachung

SHR-Füllstandüberwachungssensoren sind in verschiedenen Modellen erhältlich, jedes mit eigenen Funktionen. Zu den verfügbaren Funktionen gehören unter anderem:
- Fernüberwachung
- Alarm
- Datenerfassung
- Kabellose Verbindung
SHR-Füllstandüberwachungssensoren sind ein wertvolles Werkzeug für Unternehmen und Organisationen, die den Füllstand von Flüssigkeiten in ihren Tanks oder Behältern überwachen müssen. Die Sensoren sind präzise, zuverlässig und einfach zu bedienen.
Hier sind einige der Vorteile der Verwendung eines SHR-Füllstandüberwachungssensors:

- Präzise: Der Sensor erkennt den Flüssigkeitsstand im Tank mit hoher Genauigkeit.
- Zuverlässig: Der Sensor ist zuverlässig und fällt nicht so schnell aus.
- Einfach zu bedienen: Der Sensor ist einfach zu installieren und zu verwenden.
- Fernüberwachung: Der Sensor kann aus der Ferne überwacht werden, was für Unternehmen mit mehreren Standorten nützlich ist.
- Alarme: Der Sensor kann so eingestellt werden, dass er einen Alarm sendet, wenn der Flüssigkeitsstand einen bestimmten Punkt erreicht.
- Datenprotokollierung: Der Sensor kann Daten über den Flüssigkeitsstand protokollieren, was für Unternehmen nützlich ist, die den Flüssigkeitsstand über einen längeren Zeitraum verfolgen müssen.
- Drahtlose Konnektivität: Der Sensor kann mit einem drahtlosen Netzwerk verbunden werden, wodurch er aus der Ferne überwacht und gesteuert werden kann.
Minimaler Sensor
Der SHR-Füllstandüberwachungssensor verfügt über zwei Arten von Ausgängen: einen Arbeitsstromausgang und einen Ruhestromausgang. Der Arbeitsstromausgang ist aktiv, wenn der Sensor in das Medium eingetaucht ist, und der Ruhestromausgang ist aktiv, wenn der Sensor aus dem Medium entfernt wird. Der Ausgang wird sofort deaktiviert, wenn der Sensor in das Medium eingetaucht ist, und der Ausgang wird nach Ablauf der Fehleranzeigeverzögerungszeit aktiviert, wenn der Sensor aus dem Medium entfernt wird.
Der Arbeitsstromausgang wird zur Steuerung eines Geräts wie einer Pumpe verwendet, das zur Aufrechterhaltung des Flüssigkeitsstands im Tank dient. Der Ruhestromausgang dient zur Überwachung des Flüssigkeitsstandes im Tank. Der Ausgang ist normalerweise mit einem Controller verbunden, der einen Alarm sendet, wenn der Flüssigkeitsstand unter einen bestimmten Wert fällt.
Die Verzögerungszeit der Fehleranzeige ist die Zeitspanne, die zwischen dem Entfernen des Sensors aus dem Medium und der Aktivierung des Ausgangs vergeht. Die Störmeldeverzögerungszeit ist notwendig, um zu verhindern, dass durch geringe Schwankungen des Flüssigkeitsspiegels Fehlalarme ausgelöst werden.
Maximaler Sensor
Ein Maximumsensor ist eine Art Füllstandüberwachungssensor, mit dem der maximale Füllstand einer Flüssigkeit in einem Tank erfasst wird. Der Sensor wird typischerweise im Tank installiert, sodass die Elektrode in die Flüssigkeit eingetaucht ist. Wenn der Flüssigkeitsstand den Höchststand erreicht, taucht die Elektrode in die Flüssigkeit ein und der Sensor sendet ein Ausgangssignal.
Das Ausgangssignal eines Maximumsensors kann zur Steuerung eines Geräts wie einer Pumpe verwendet werden, das den Flüssigkeitsstand im Tank aufrechterhält. Der Ausgang kann auch zur Überwachung des Flüssigkeitsstands im Tank verwendet werden. Der Ausgang ist normalerweise mit einem Controller verbunden, der einen Alarm sendet, wenn der Flüssigkeitsstand den Höchststand erreicht.
Die Verzögerungszeit der Fehleranzeige ist die Zeitspanne, die zwischen der Erkennung des maximalen Flüssigkeitsstands durch den Sensor und der Aktivierung des Ausgangs vergeht. Die Störmeldeverzögerungszeit ist notwendig, um zu verhindern, dass durch geringe Schwankungen des Flüssigkeitsspiegels Fehlalarme ausgelöst werden.
Wenn der Maximumsensor aus dem Medium entfernt wird, wird der Ausgang sofort deaktiviert. Dies liegt daran, dass die Elektrode nicht mehr in die Flüssigkeit eingetaucht ist und der Sensor den Flüssigkeitsstand nicht erkennen kann.
M14 x 1,5 9-36 V DC MIN 0 7 – – – – – 500 320 500 113 500 314
M18 x 1,5 9-36 V DC MIN 0 0 – 500 170 – – – – – 500 114
M18 x 1,5 9-36 V DC MAX 0 0 – – 500 063 500 171 – – – 500 297
M18 x 1,5 9-36 V DC MAX 0 3 – – – – – – 500 108 –
M18 x 1,5 9-36 V DC MIN 0 7 – – – – 500 038 – 500 110 500 265
M18 x 1,5 9-36 V DC MAX 0 7 500 014 – 500 068 – – – 500 115 500 112
M18 x 1,5 9-36 V DC MAX 2 3 – – – 500 257 – – – –
M18 x 1,5 9-36 V DC MIN. 2 7 500 015 500 091 500 065 500 069 500 039 500 041 500 188 500 189
M18 x 1,5 9-36 V DC MAX 2 7 500 010 500 013 500 064 500 067 500 040 500 190 500 111 500 191
M18 x 1,5 9-36 V DC MIN 0 20 – – – – – – – 500 109
M18 x 1,5 9-36 V DC MAX 0 20 500 011 – 500 070 – – – – –
M18 x 1,5 9-36 V DC MIN 2 20 500 012 – 500 066 – – – – –
G 1/2“ 9-36 V DC MIN 2 7 – – – 500 270 – –
M18 x 1,5 9-36 V DC MAX 0 0 – 500 229 – 500 231 – 500 234 500 104 500 236
M18 x 1,5 9-36 V DC MIN 0 7 – 500 230 – 500 232 – 500 035 500 107 500 088
M18 x 1,5 9-36 V DC MAX 0 7 500 007 500 203 500291 500 207 500 034 500 211 500 100 500 213
M18 x 1,5 9-36 V DC MAX 0 7 500 289 * – – – – – – –
M18 x 1,5 9-36 V DC MIN 2 7 500 008 500 192 500 061 – 500 037 500 036 500 106 500 089
M18 x 1,5 9-36 V DC MAX 2 7 500 009 – 500 059 – 500 233 – 500 235 –
M18 x 1,5 9-36 V DC MIN 0 20 – – – 500 062 – – 500 087 500 086
M18 x 1,5 9-36 V DC MAX 0 20 – – – – – – 500 103 –
G 1/2″ 9-36 V DC MIN 2 7 500 201 – 500 205 – 500 209 – 500 101 –
G 1/2″ 9-36 V DC MAX 2 7 500 200 – 500 204 – 500 208 – 500 085 –